即使造出了世界上最先进的昆虫微型飞行器(MAV),如果它不能稳定着陆,最终也不会有什么用处。正因如此,哈佛大学的科学家们为他们的RoboBee设计了一对类似大蚊的长腿,并配有关节。
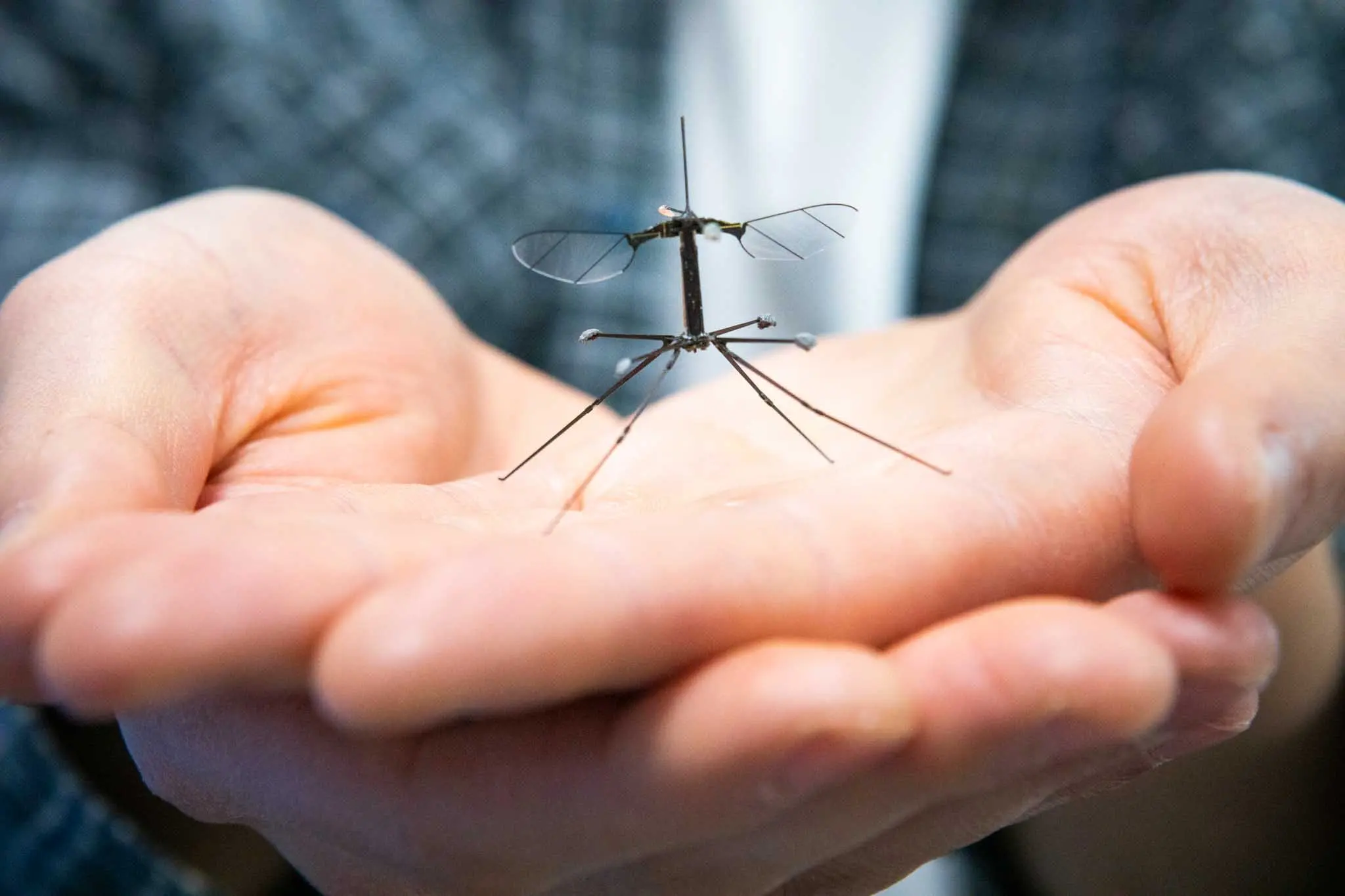
RoboBee 拥有模仿蚊子的腿部——未来版本可能会用于搜索和救援行动,或用于农作物授粉
对于那些不熟悉RoboBee的人来说,它是一款受蜜蜂启发的机器人,通过拍打一对装有人造肌肉的微型翅膀来飞行。它的翼展不到 3 厘米(1.2 英寸),重量仅为十分之一克……尽管它通过电线连接到电源和微处理器。话虽如此,未来的版本最终可能会完全独立运行。事实上,目前已经有一款太阳能版本了。
虽然这款小型机器人的其他版本已经证明能够完成水下飞行和悬垂式停歇等动作,但基础型号在平坦(或其他)表面上的着陆表现一直不太好。这是因为其拍打翅膀产生的涡流在被地面束缚时会引起空气湍流,从而导致机器人失去平衡。
“以前,如果我们要着陆,我们会在离地面稍远的地方关闭飞行器,然后任其坠落,并祈祷它能够直立安全地着陆,”领导机器人机械重新设计的工程研究生 Christian Chan 说道。

蚊因其软着陆的能力而闻名
RoboBee 的四条新腿受到蚊子腿的启发,它足够长且灵活,以至于在机器人主体受到地面效应湍流的影响之前,它们都可以安全地与地面接触。
此外,新的控制算法有助于引导机器人更平稳地落地,而不是让它“直接掉落”。

RoboBee 使用新腿从一片叶子起飞并降落到另一片叶子上的多重曝光
“在种类繁多的昆虫中寻找生物灵感,为我们提供了无数途径来持续改进机器人,”该研究论文的合著者、博士后研究员艾丽莎·埃尔南德斯(Alyssa Hernandez)说道。“反过来,我们可以将这些机器人平台用作生物学研究的工具,开展检验生物力学假设的研究。”
该论文最近发表在《科学机器人》杂志上。在下面的视频中,您可以看到RoboBee模仿鹤蝇的着陆动作。
资料来源:哈佛大学约翰·保尔森工程与应用科学学院