多年来我们已经见过许多不同的机器水黾,但科学家们仍在不断探索这种昆虫新的巧妙之处,并加以复制。例如,最近,研究人员发明了一种水黾机器人,它可以通过脚上的风扇在水面上快速移动。

Rhagovelia 水黾体长仅有 3 毫米,确实很特别。它们两条长长的中足(用于推进)末端长着羽毛状的附肢,触及水面时会展开。当它们向前划动时,这些在水下的附肢会像青蛙趾间的蹼一样,将水面托起,迅速地推动着昆虫向前。
在划水结束时,扇形触手被拉出水面,湿润的触手会聚集成一个点——有点像刚浸过水的画笔的刷毛。这使得触手在腿部向前摆动、准备进行下一次划水时,呈现出更流线型的形态。

一只长着扇子的 Rhagovelia 水黾——在这张照片中,它的扇子和爪子朝下,映照在水面上,就像一面镜子
这些扇形结构使昆虫能够以每秒约120个身体长度的速度在水面上快速移动。更重要的是,只需在水面一侧部署一个吸水扇形结构,水黾就能在大约50毫秒内完成90度的转弯。
基于这种想法,来自加州大学伯克利分校、韩国亚洲大学和佐治亚理工学院的科学家们决定对Rhagovelia进行更深入的研究。
利用电子显微镜,亚洲大学的高济成(Je-Sung Koh)教授和博士后研究员金东进(Dongjin Kim)发现,每根扇形的单根细丝都由一个扁平、柔韧的带状中心条带组成,其两侧分支出更小的羽枝——这真的很像羽毛。这种设计使得扇形的附肢在水下可以展开,因此可以像桨一样使用。
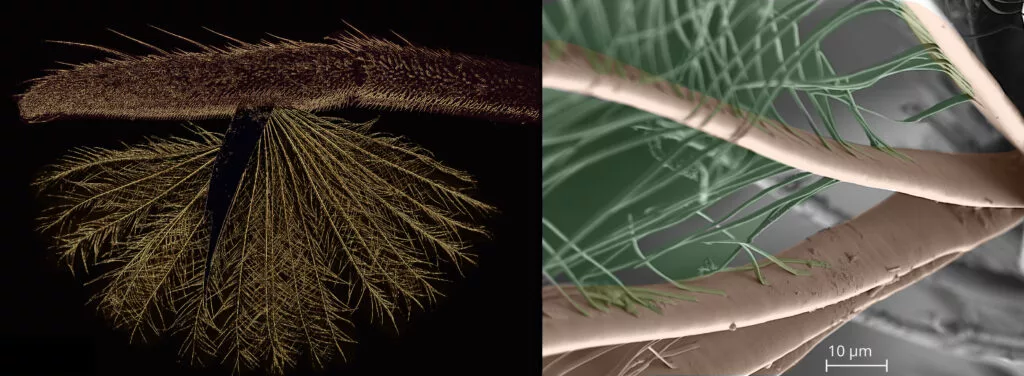
左边是 Rhagovelia 两条划桨足末端的扇形和爪子的照片,右边是扇形的彩色扫描电子显微镜图像,显示了扇形的羽枝和构成扇形的较小羽枝(绿色)的扁平带状微结构
科学家们还发现,水的表面张力提供了使这些线状物展开所需的全部弹力。此前人们一直认为这种展开动作是由肌肉驱动的。在划水过程中,少量的肌肉力量被用来保持这些线状物处于紧张状态,但并不需要任何肌肉力量来展开它们。
基于这些发现,该团队创造了一种机器人版本的昆虫,名为 Rhagobot。它肯定比同名的要大,长8厘米,宽10厘米,高1.5厘米(3.1 x 3.9 x 0.6英寸)。在它中间两条腿的末端,各有一个1毫克重的类似Rhagovelia的扇形结构,其扁平带状微结构尺寸为10 x 5毫米。
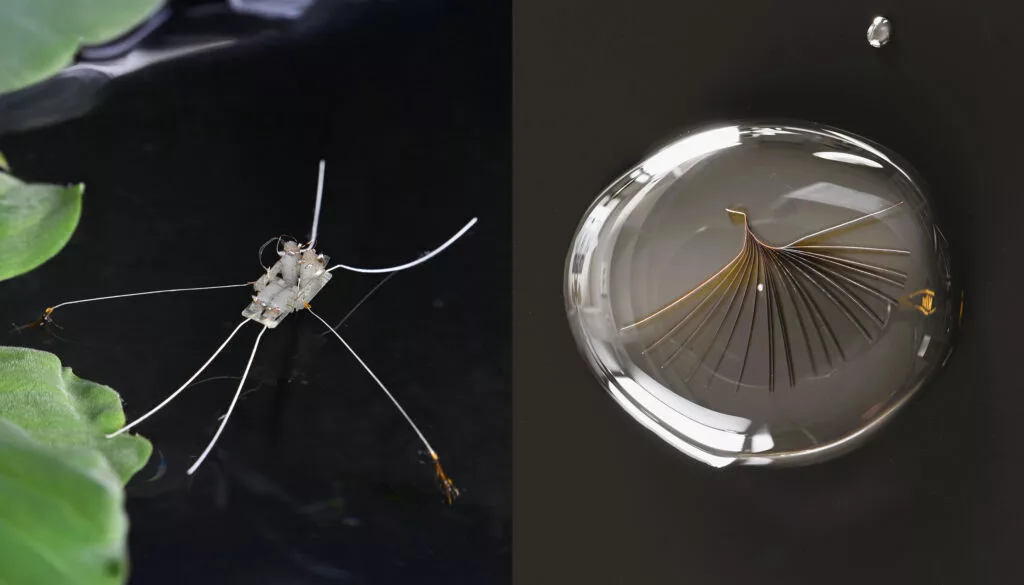
半水生机器人 Rhagobot(左)旁边是其仿生风扇的特写,该风扇在接触水时打开
整个机器人通过硬线连接到外部电源,重量仅为五分之一克。目前,它能够以每秒两身长的距离在水面上快速移动,并在不到半秒的时间内完成90度转弯。人们希望Rhagobot的后代能够更快、更灵活,从而应用于搜救或环境监测等应用。
“我们的机器人风扇仅利用水面力和灵活的几何形状就能自我变形,就像它们的生物对应物一样,”与佐治亚理工学院萨阿德·巴姆拉教授共同撰写这项研究的资深合著者高教授说道。“这是一种机械嵌入式智能,经过数百万年的进化,自然界对其进行了精炼。在小型机器人领域,这种高效而独特的机制将成为突破传统机器人小型化限制的关键技术。”
这项研究由加州大学伯克利分校助理教授 Ortega-Jiménez 领导,其论文最近发表在《科学》杂志上。您可以在下方视频中看到 Rhagobot 的实际运行情况。