新加坡科研团队打造“仿生蟑螂巡检队” 专业为老旧管道查漏
新加坡南洋理工大学的一支科研团队,正在把原本用于灾害救援的“赛博蟑螂”,改造成监测基础设施安全的特殊工具,用以钻入常规机器人难以抵达的狭窄空间,检查老化管线与地下设施。 这些“仿生蟑螂”由活体蟑螂和可远程操控的电子背包组成,科研人员通过电信号精确引导其行动轨迹,为城市地下网络提供一种全新的巡检方式。

该项目由南洋理工大学机械与航空航天工程学院教授佐藤裕隆(Hirotaka Sato)领衔,他是赛博昆虫研究领域的先行者之一。 早年间,他通过对甲虫进行改造,实现了全球首例可远程操控飞行的“赛博甲虫”,这一成果随后被收录进吉尼斯世界纪录。 如今,他和团队正在推动相关技术从灾害应对场景,走向更为日常化的基础设施运维用途。
“我们现在在测试一些日常用例,比如检查老旧管道。”佐藤在接受《金融时报》采访时表示。 蟑螂的身体结构在漫长演化过程中形成了擅长挤入缝隙的能力,而这正是许多轮式、履带式甚至蛇形机器人难以完全比拟的优势。 因此,将蟑螂的天然机动性与南洋理工研发的控制模块结合,便构成了一种适合穿梭狭窄空间的新型巡检工具,尤其适用于电力、通信、给排水等地下管廊以及污水管线等人类和传统机器人难以轻易涉足的环境。
每只赛博蟑螂背上都负载着一个轻量化电子模块,该模块通过微弱电信号刺激来引导昆虫的移动方向。 操作人员可以通过控制终端向模块发送信号,实现对蟑螂的远程转向与行进控制。 最新版本的控制系统在电压需求上比此前降低了约25%,从而延长了整体续航时间。 项目组成员强调,这些电脉冲并不会给蟑螂带来疼痛感。
早在一年之前,该团队就曾将这套系统应用于极端灾害现场。 当时,10只携带红外摄像头的赛博蟑螂被部署至缅甸一场震级达7.7级的地震灾区,试图在废墟中搜索幸存者。 虽然这次行动未能发现生命迹象,但证明了赛博蟑螂在真实灾害环境中的可行性与耐受力,为后续拓展应用场景奠定了基础。
在完成灾害场景验证后,团队开始着力提升系统的规模化部署能力。 通过引入自动化组装工艺,研究人员如今只需略多于一分钟便能将一个控制模块固定在一只蟑螂身上,而在此前,同样的操作往往要耗费一个小时左右。 装配效率的大幅提升,使得未来在大范围巡检任务中一次性部署大量赛博蟑螂成为现实选项。
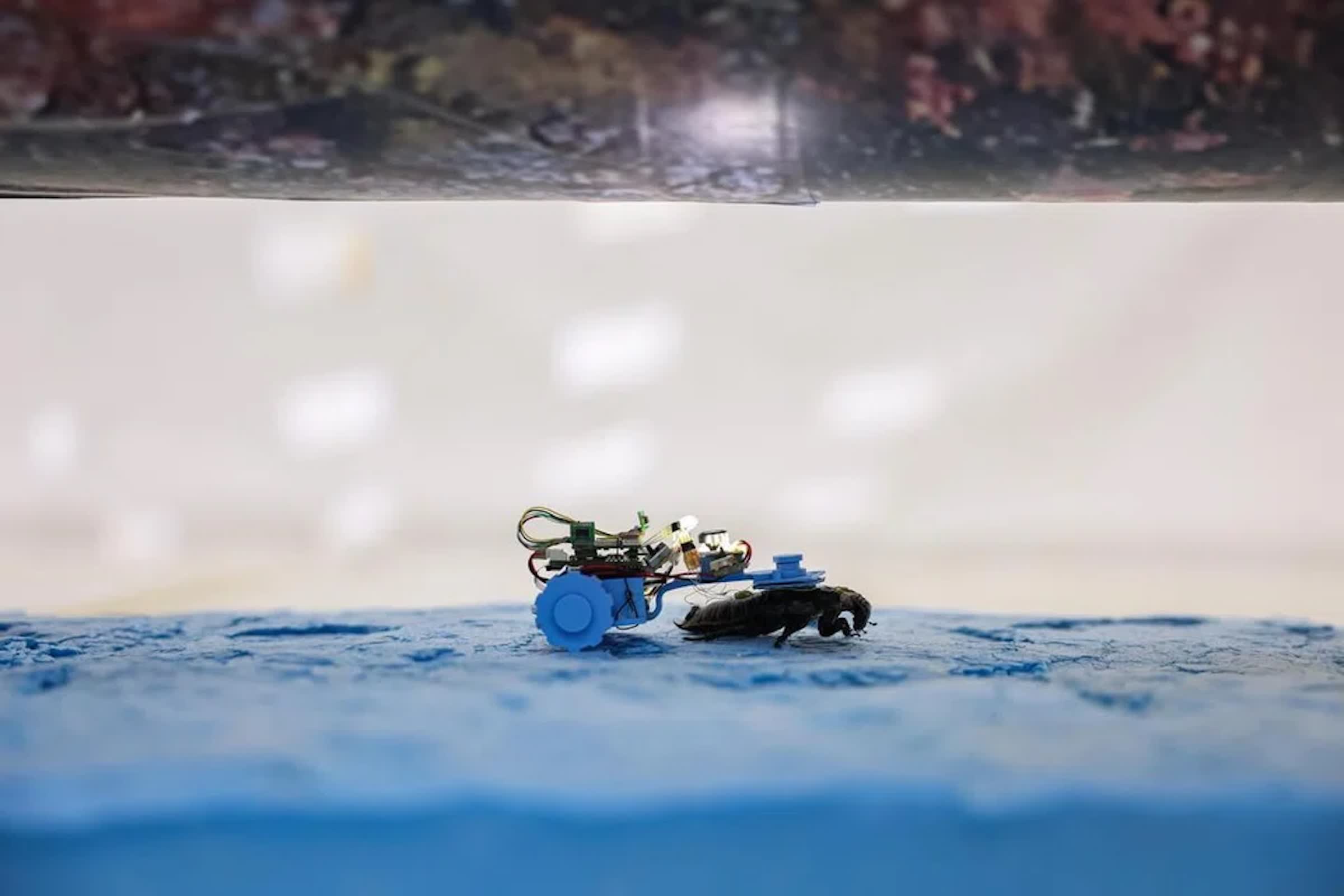
随着应用场景从倒塌建筑转向城市管网,赛博蟑螂的“装备形态”也发生了明显变化。 此前用于救援的版本多采用紧凑式背负设计,而最新原型则让蟑螂拖曳一套微型“战车”——这一小车配备照明灯、摄像头和更大容量电池,并安装有小型车轮,使整体负载在管道内移动更加平稳。 在巡检任务中,蟑螂拉动这套装置在管道内前行,实时采集管壁破损、渗漏等情况的图像和数据。 团队计划近期在新加坡的部分交通和市政设施中开展本地试运行。
尽管赛博蟑螂在基础设施维护之外仍有广泛潜力,但佐藤明确强调,南洋理工的相关研究严格定位于民用领域。 这一表态并非多余,因为在其他机构,类似的“昆虫—电子”混合集成项目正逐步走向军事和情报方向。 例如,德国初创公司 Swarm Biotactics 就公布过用于侦察用途的“蟑螂监视平台”原型,将赛博昆虫视为潜在的隐蔽情报收集工具。
与之形成对比的是,南洋理工校园里的赛博蟑螂项目始终围绕民用与公共服务展开。 在完成既定任务后,这些蟑螂会被“退休”,被安置在装有新鲜生菜的容器中安度余生。 对研究团队来说,这种兼顾工程效益与动物福利的安排,也是他们在探索前沿仿生技术时希望坚持的底线之一。