怪异的“流水线”在一分钟内拼合出蟑螂机器人
一些科学家不再费时费力地从零开始设计和制造微型机器人,而是将现有的昆虫改造成可遥控的机器人。一条新的“装配线”或许能提供帮助,它能以远超手工的速度将蟑螂改造成机器人。
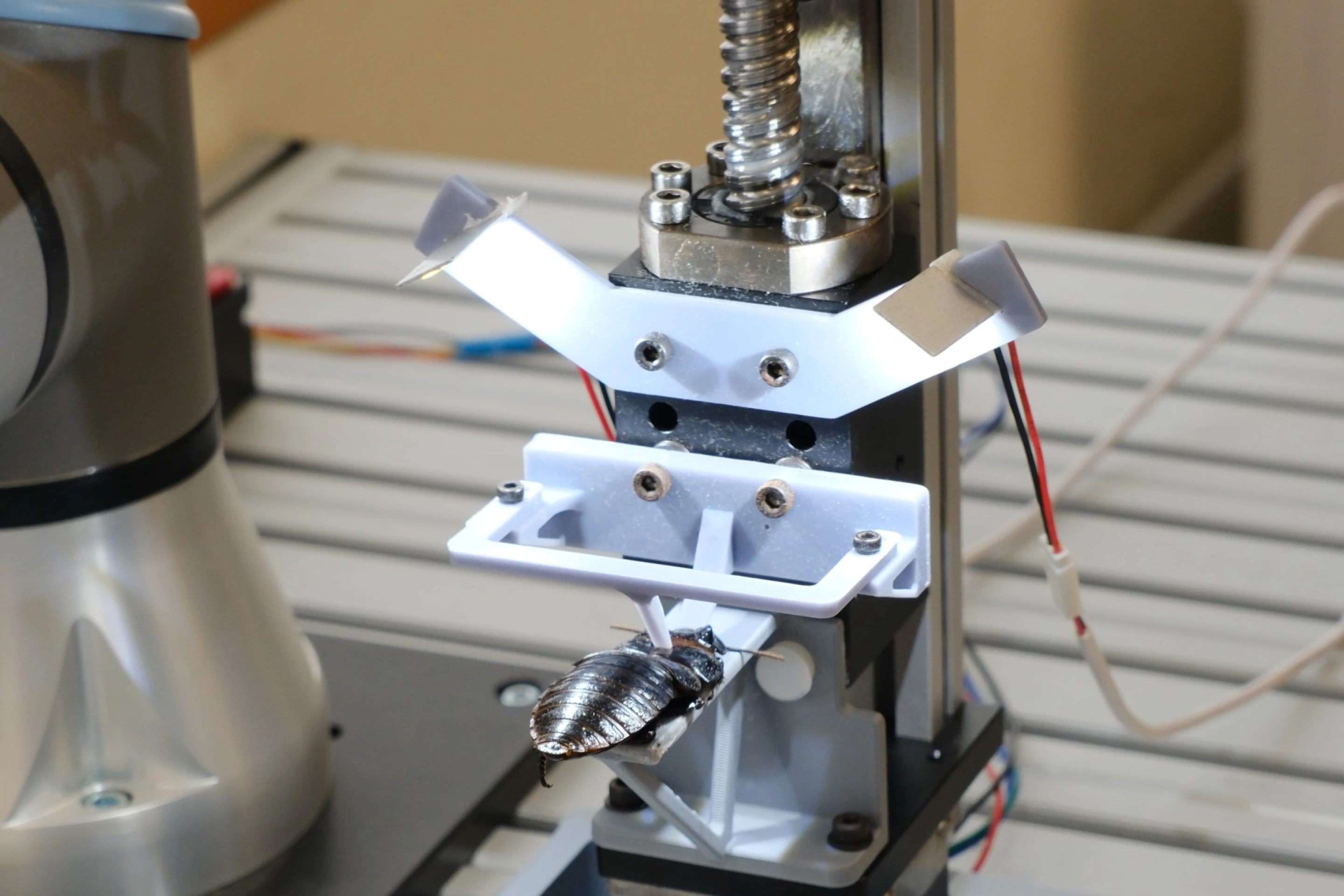
流水线设备中一只麻醉的蟑螂正在等待它的电子背包
简单来说,机器人昆虫通常由一只体型较大的昆虫(通常是马达加斯加发声蟑螂)组成,它被配备一个小型电子背包。背包中的远程控制电极会刺激昆虫的触角或眼睛等身体部位,使其开始和停止行走,以及向左或向右转弯。
当然,整个事情并不只是出于病态的好奇心。这种机器人的主要用途之一是搜寻灾难现场被困废墟中的幸存者。配备遥控摄像头的“蟑螂”机器人可以挤过废墟中原本无法通行的缝隙,并传输实时图像以及它遇到的任何幸存者的坐标。
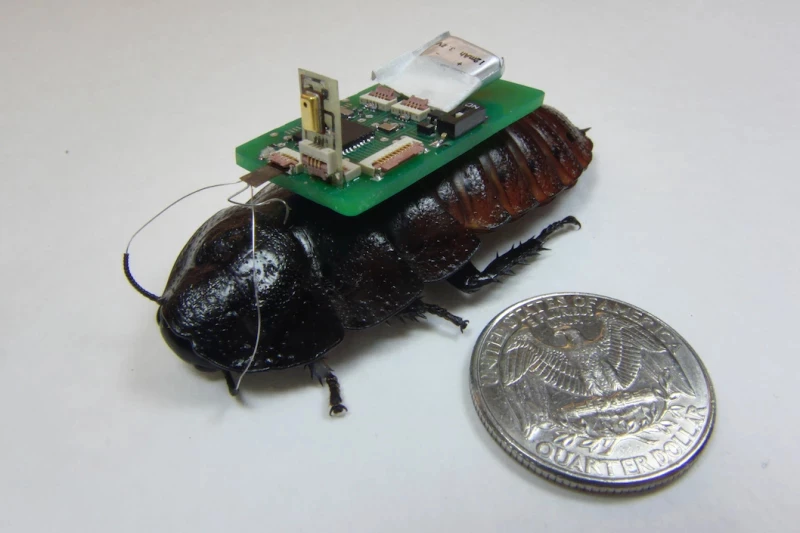
北卡罗来纳州立大学研发的机器人蟑螂
然而,对于如此大规模的任务,仅仅几只机器人蟑螂是不够的。
设想中,大群昆虫将被部署在废墟中,甚至可能通过背包之间的无线通信来协调它们的搜寻路线。例如,如果两个机器人的路线重叠,它们的背包就能引导它们彼此分开。
为了使这项技术切实可行,蟑螂不能通过手工精心改造……它们需要通过自动化流程快速生产出来。这就是流水线的作用所在。
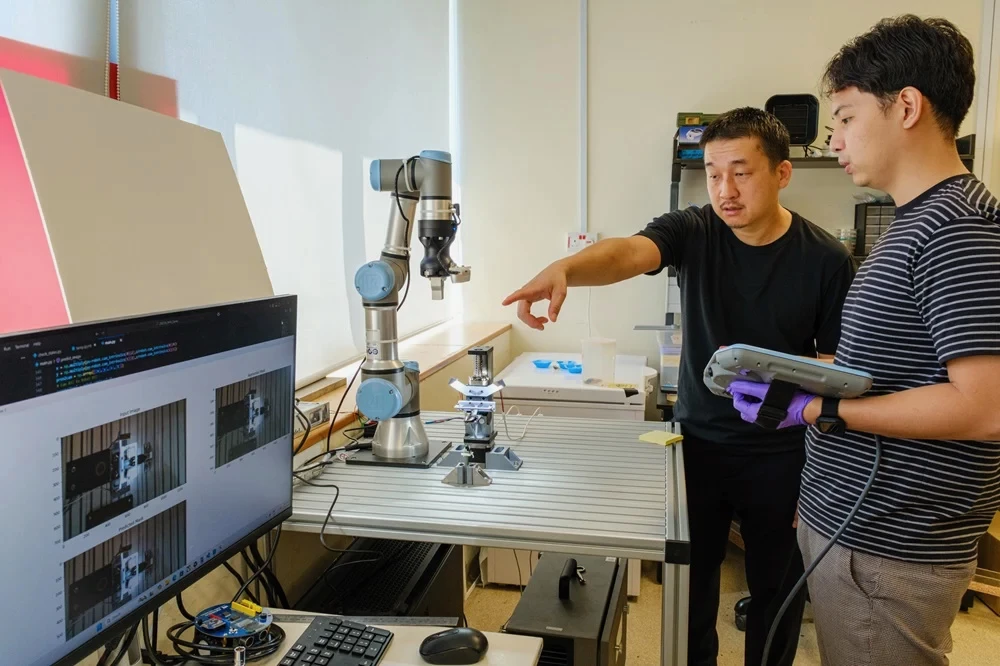
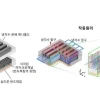
该装配线的开发(如图)得到了日本科学技术振兴机构的支持
该计算机控制系统由新加坡南洋理工大学的Hirotaka Sato 教授及其同事开发,包含一个用于固定昆虫的平台、一个英特尔 RealSense 深度感应摄像头和一个带有 Hand-E 机器人夹持器的 UR3e 机械臂。
将麻醉后的蟑螂固定在平台上后,电机会将装置滑入到位,然后计算机视觉系统会评估蟑螂的体型和位置。随后,蟑螂外层角质层的一部分会被拉回,露出其前胸背板和中胸体节之间的一层膜。
接下来,将一个预装好的2.3克重的背包放入蟑螂体内,并将背包前端的两个双极电极植入蟑螂暴露的腹膜左右两侧。然后,将主背包轻轻按压在蟑螂的中胸上,直至其卡住到位。最后一步,将平台滑出,释放仍处于麻醉状态的蟑螂。
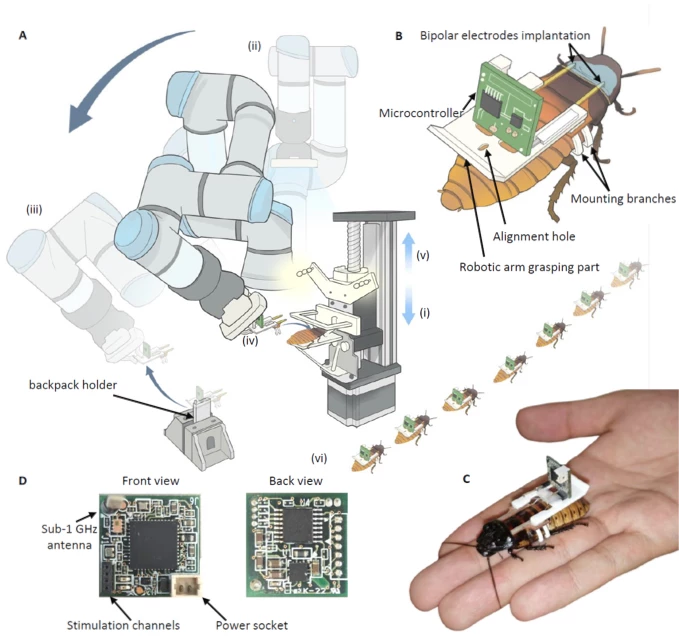
装配线和机器人蟑螂的示意图——在缅甸发生 7.7 级地震后,手工组装的机器人已经进行了现场测试
每只蟑螂的整个过程耗时68秒,而手工完成相同任务则需要15分钟到一个小时。在对流水线蟑螂和手工组装的机器人蟑螂进行的测试中,发现两组蟑螂在执行遥控任务(例如沿着S形路径行走和探索障碍物)时表现相似。
对昆虫(以及背包电池)来说,这套特殊的机器人装置还有一个额外的好处:只需类似系统 40% 的刺激时间和 75% 的刺激电压。而且,背包可以在任务间隙拆卸。
“我们的创新让在现实场景中部署大量机器人昆虫的梦想变得更加现实,”佐藤说道。“通过自动化流程,我们可以快速、持续地生产昆虫混合机器人。这将使我们能够大规模地进行生产,这对于灾后搜救等时间紧迫的行动至关重要。”
该研究的论文最近发表在《自然通讯》杂志上。