AMOLF研究所的气动机器人利用物理结构而非电子设备来运动
摘要:
虽然软体机器人本身可以相当简单、低成本,但它们通常需要复杂的机载电子设备来控制其运动。然而,这种新型机器人并非如此,它利用物理现象来自动移动其充气腿。这款微型机器人由荷兰AMOLF研究所的Alberto Comoretto、Mannus Schomaker和Bas Overvelde设计,有两足和四足两种版本。两种版本的每条腿都由一圈带有扭结的弹性体管组成。

当空气平稳、持续地被泵入那条腿时,弯曲部分会沿着管子向下移动,使其产生振荡。这与用于商业推广的旋转充气“管舞者”的原理相同。
这种软机器人用腿“思考”:自振荡肢体的物理同步
当机器人的腿最初被激活时,它们会混乱地移动。

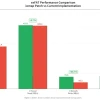
然而,在几毫秒内,当它们彼此互动并与地形相互作用时,它们会自动开始同步移动。之后,该机器人能够以每秒高达30个身长的速度(在平坦路面上)快速移动,这比任何其他气动机器人都要快得多。

对于机器人来说是一小步,对于机器人种类来说是一大步
如果机器人在遇到障碍物或不平坦的地形时停下步伐,一旦再次加速,它的双腿就会重新同步。更令人印象深刻的是,由于液体的物理特性,这个浮力机器人入水后会自动采用来回交替腿的游泳步态。

“只要我们了解如何利用底层物理原理,像管子这样的简单物体就能产生复杂且实用的行为,”奥弗维尔德副教授说道。“没有大脑,没有计算机……但如果设计得当,它可以超越许多机器人系统,表现得像一个人造生物。”
人们希望该技术未来能够应用于诸如在体内输送药物的微型机器人、节能辅助外骨骼,或专为在电子设备可能发生故障的恶劣环境(如外太空)中使用的机械。
有关这项研究的论文最近发表在《科学》杂志上。